

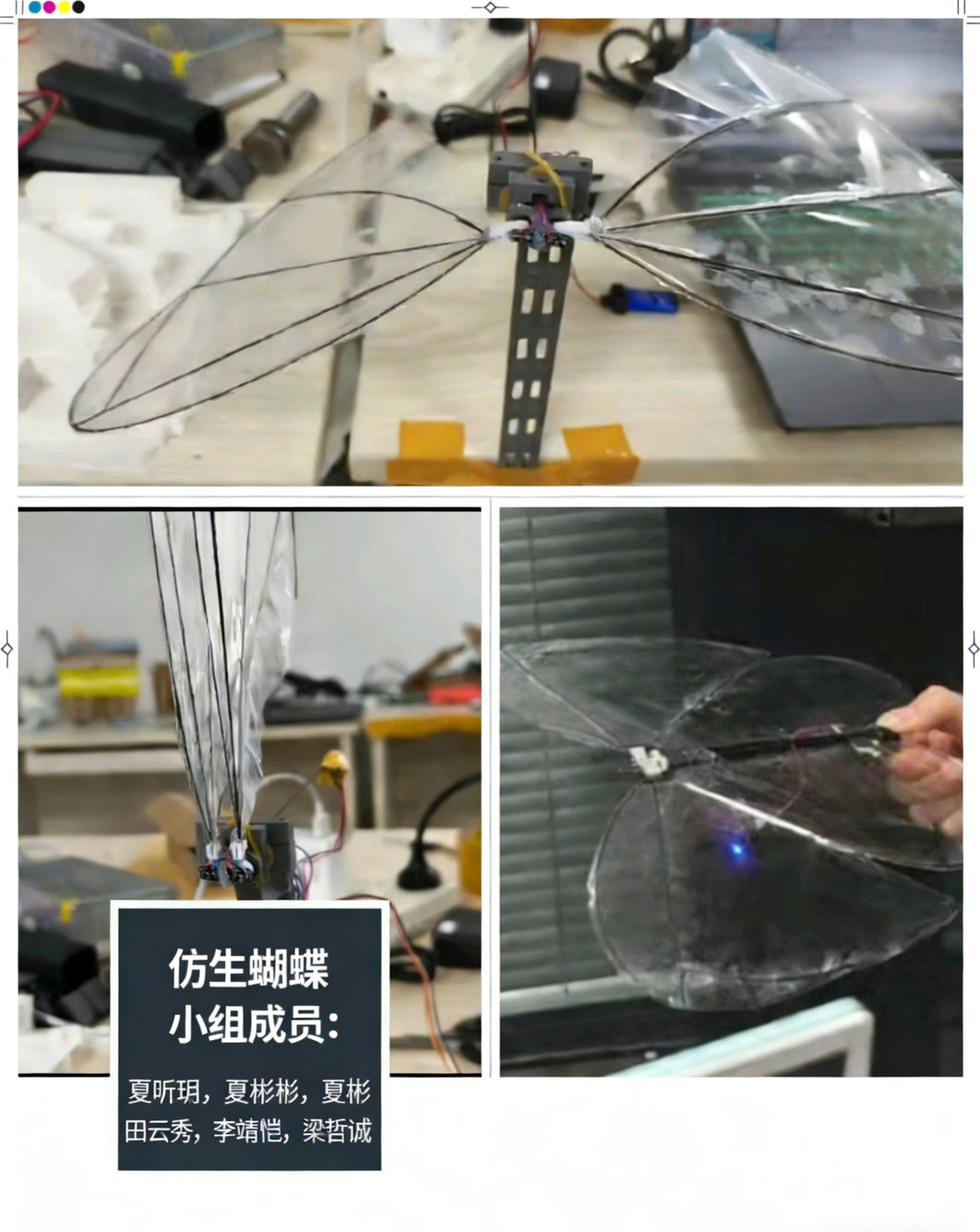
本项目致力于设计并制造一款基于 STM32G031 微控制器的仿生扑翼飞行器(仿生蝴蝶)。在机械结构上,项目采用轻量化的实心碳纤维杆构建骨架,并配合1.26丝 PET 薄膜制作具有气动弹性变形能力的翅膀 。动力与控制系统方面,采用左右双电机独立驱动配合3级减速齿轮箱,以模拟昆虫高扭矩、低频次的扑动特性,并集成 AS5600 磁编码器实现闭环反馈控制 。此外,系统利用 ELRS 无线通信协议解析 CRSF 信号,实现了低延迟的远距离遥控功能 。
项目的核心目标是攻克扑翼机对重量敏感及控制复杂的难题,实现稳定可控的仿生飞行。具体技术目标包括:
多模式运动控制: 实现“停机中位校准”、“滑翔姿态锁定”以及基于余弦波轨迹生成的“扑动飞行”三种状态机的切换 。
精准姿态控制: 利用位置式 PID 算法与磁编码器反馈,通过改变扑动频率控制升力,通过改变左右翅膀的拍打幅度差(偏航)来实现差速转向 。
动力学优化: 将电机高转速转换为适合扑翼的5 - 15Hz低频往复运动,确保能够有效克服空气阻力产生推力 。
经过硬件集成与算法调试,项目成功完成了仿生蝴蝶的实物制作与飞行测试,主要成果如下:
飞行性能: 实现了5 - 15Hz的稳定扑动频率,高频下振幅可达±30°,能够产生充足的飞行升力 。
操控灵活性: 实现了灵敏的差速转向,左右翅膀幅度差可控在5 - 10°,转向半径小于1.5米,且响应无延迟 。
续航与稳定性: 在使用7.4V 65mAh电池的情况下,持续扑动模式续航约12分钟,滑翔模式可达18分钟;连续飞行测试中主控板运行稳定,电机温度控制在45℃以下,验证了系统设计的可靠性 。
